前几天在地图上找家附近有什么可看的东西。往北一个 block,有一个很小的美术馆,展出全景画
打开网站看看有什么可看的……

Shengjing Panorama,吓到我了,说的不会是沈阳吧?
还真是😂
在万里之外能看到描绘自己家乡的历史场景的美术作品,着实是没想到……必须得去看看。于是今天我来到这家美术馆

在通往全景画展厅的过道一侧,赫然立着沈阳站的模型

hmmm……好像短了一截,两侧各少了一扇窗,不过意思到了
但是,为什么是现在的沈阳站啊!一百年前不是叫奉天驿的吗!
沿着螺旋楼梯上来到达展厅。展厅是个圆形的房间,全景画在墙壁上,墙与过道之间是一些微缩模型,构成了画面的延续。天花板和地板上有隐藏的灯,随时变换,模拟日光的变化。展厅内还播放着城市日常的杂音,看介绍以及从其中的几句英文可以猜想应该是美国的策展人实地采风录制的。20年代的街景配上偶尔出现的现代汽车声,也挺魔幻的。
接下来仔细看看这幅画。视点大约是内城城墙西南角内侧。从故宫开始逆时针转一圈……

故宫。整幅画里大概故宫是还原最准确的部分……故宫东北角外那个看来是钟楼。我都不知道沈阳以前也有钟楼

后面那一排高大的建筑实在是没对上号

故宫西北角的鼓楼,与钟楼同理。鼓楼左边那座塔,经查应该是崇寿寺,我都没听说过这个地方……

内城西侧,没什么值得关注的点。前面地上这些模型挺有意思的,到模拟夜间的时候民居里面会亮灯,但我很是搞不懂为什么都是平行四边形😂
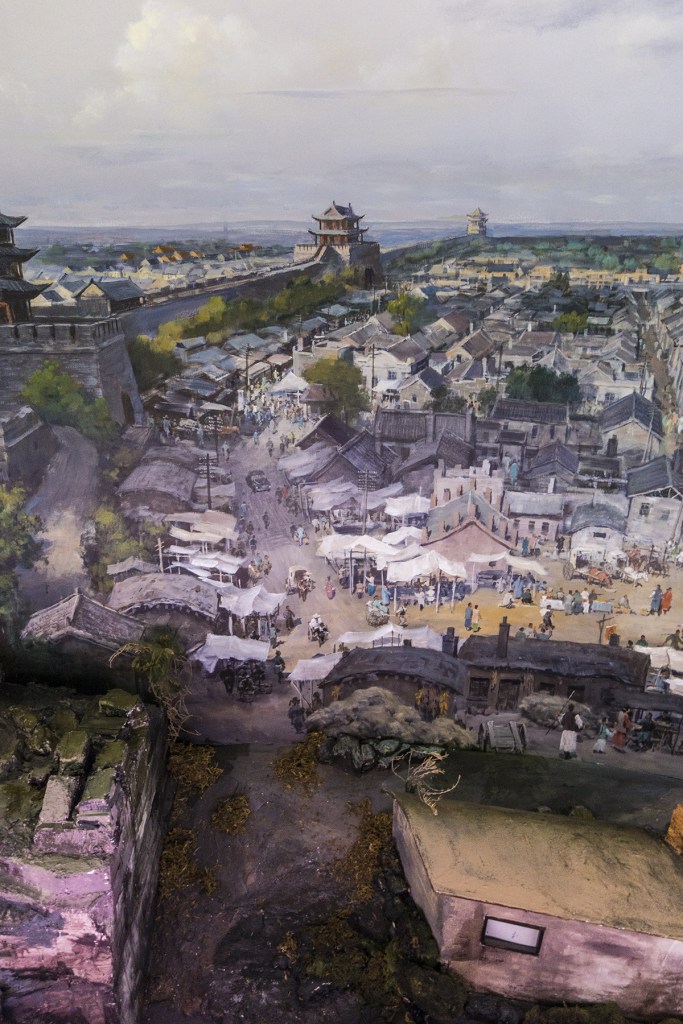
小西门。小西门左侧应该是太清宫

大西门。其实沈阳城门名字取得挺有意思的,抚近(大东)怀远(大西),内治(小东)外攘(大东),天佑(小南)地载(小北),我看连北京城门也就崇文宣武还有得一拼,可惜这些名字都不用了,只用小大东西南北,不仅城墙拆了,地名也没留下来
出了内城之后透视开始明显不科学了😂不过要把散布在广大范围内的地标都表现出来大概确实没办法吧。中间上方应该是辽宁总站,我从来都没去过。左侧除了实胜寺看不出来还能是什么地方,但感觉很不像啊……

远方的昭陵

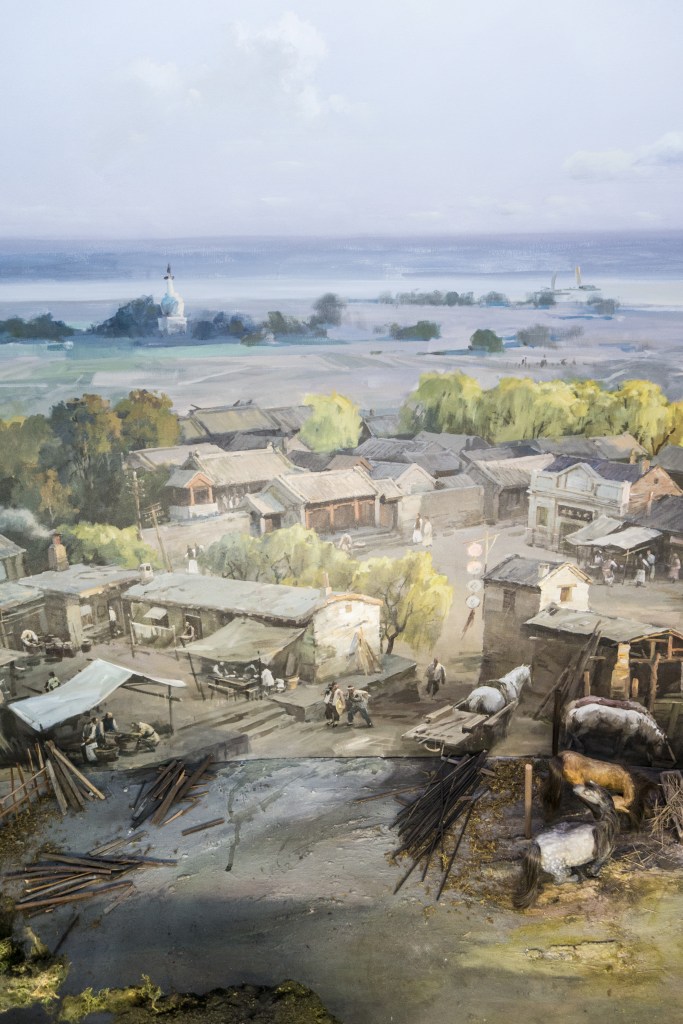
这个地方让我大惑不解……右边的藏式白塔显然是西塔。左边呢?唯一差不多在那个方向的中式塔只能是无垢净光舍利塔,但它离得非常远啊……时空扭曲了……而且前面似乎有条河,连北运河也被扭曲了……为啥不把新乐遗址也带来?😂

于洪区的方向一片荒芜😂

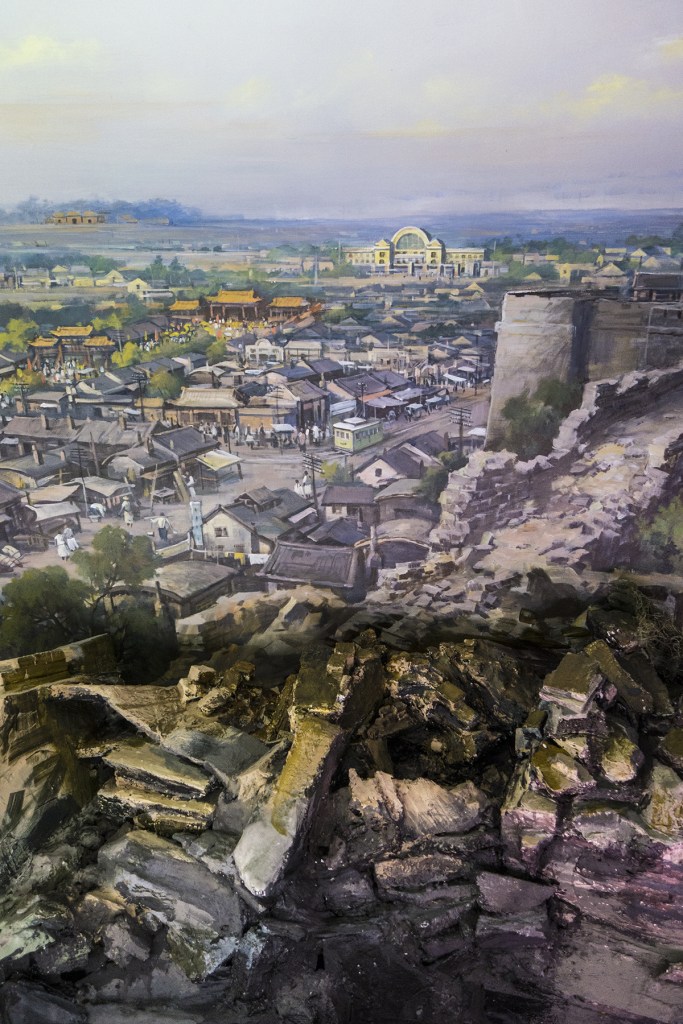
进入奉天满铁附属地

奉天驿闪亮登场😂考虑到他们还专门做了个沈阳站的模型,他们对这个区域应该是比较重视的,不过我又疑惑了……站前的这条马路是那一条?如果是正对的话那就是千代田通,但根据视点千代田通应该偏向左侧。偏向右侧的只能是浪速通,但画中又没有浪速广场……
以及……我的母校呢?😂画面中间有一小块绿地,并且里面有一座水塔一样的建筑,姑且认为要表现的是千代田公园吧😂那么大马路应该是千代田通,绿地和大马路之间应该就是我的母校了😂
还有,铁西区整个被他们炸了😂

从奉天驿出来大概二十多节车厢的距离就到浑河了😂




这边作者有点放飞自我了,出内城没几步就到了浑河边😂有一说一,水确实有灵气,城外有一条大河马上就感觉不一样

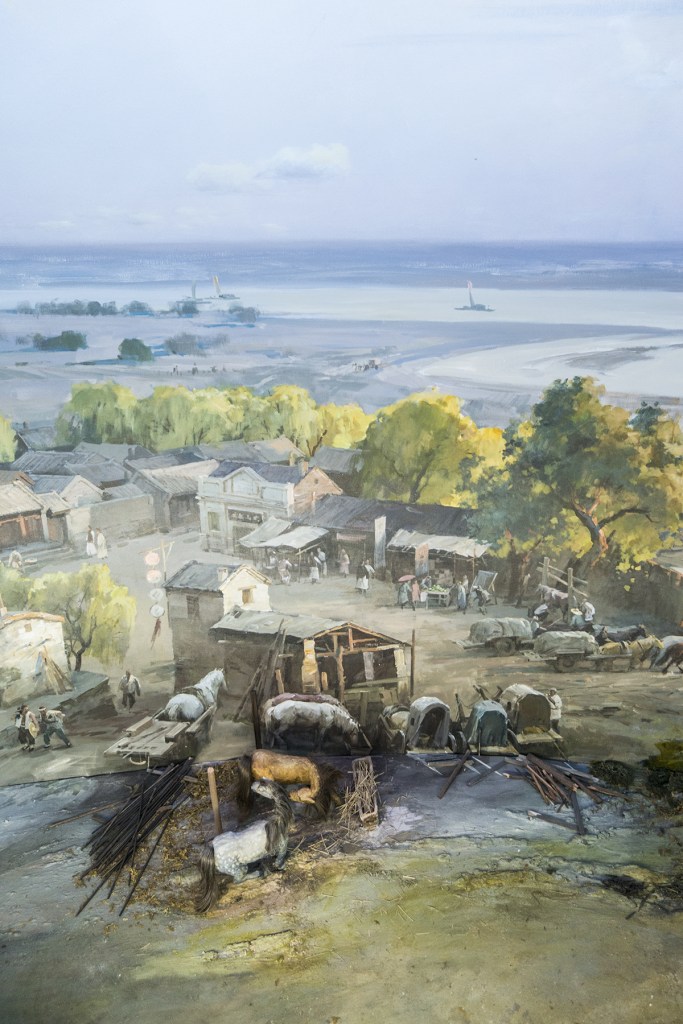
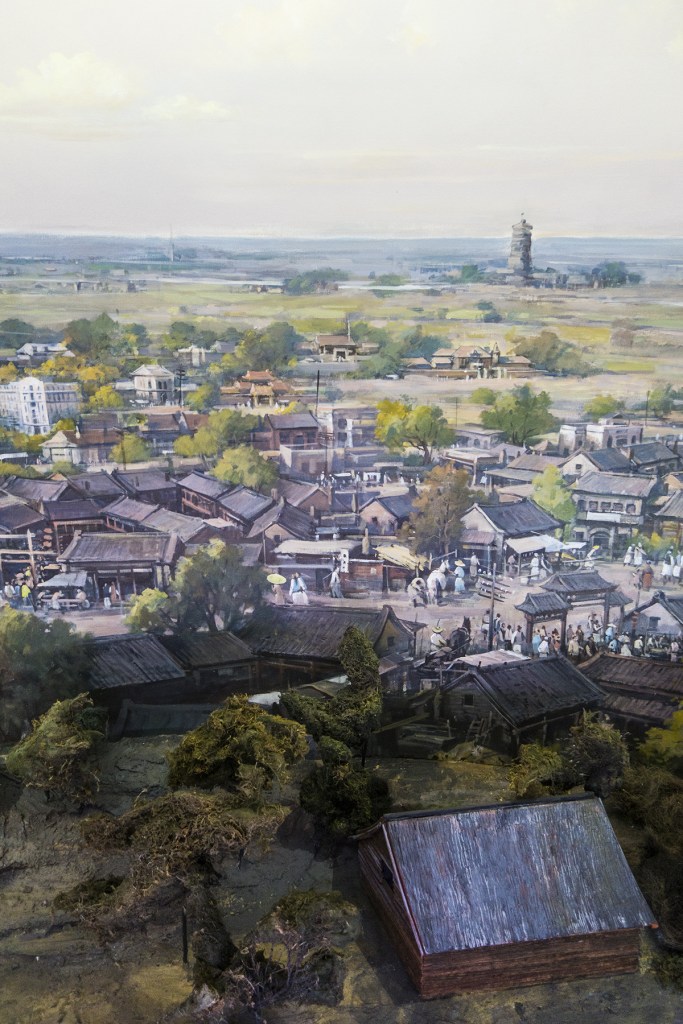
从这开始有很多市井生活场景。前面的这个模型是做得不错,与画面无缝衔接
南塔出现了

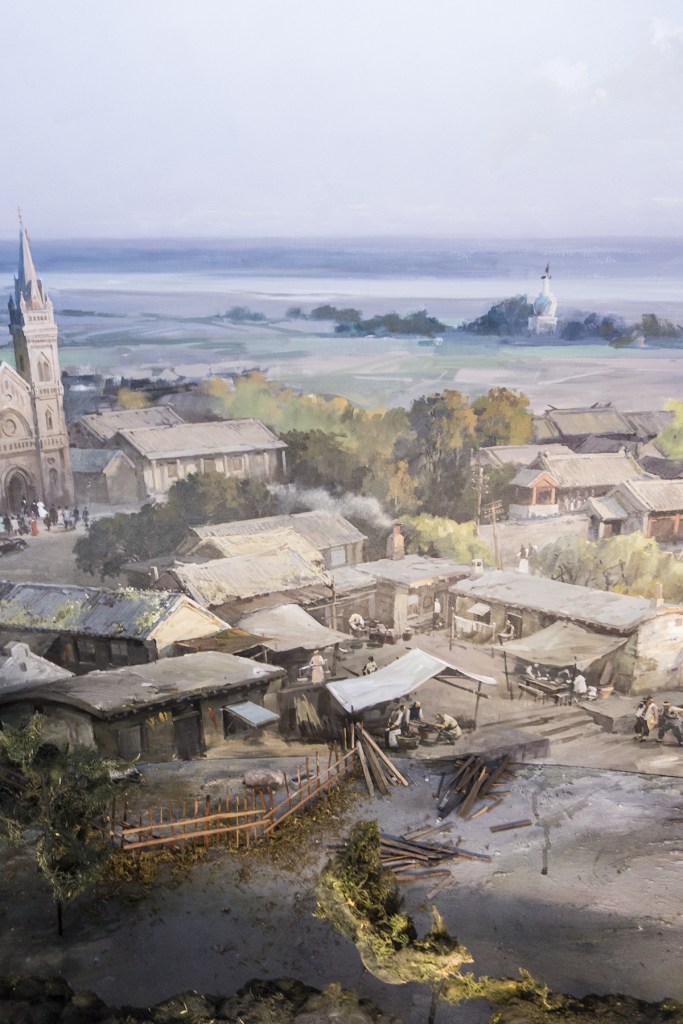
耶稣圣心主教座堂。作者又调皮了,教堂正面其实是朝南的,这里为了能在画面里看到正面硬是把它顺时针转了90°
还有,我发现 google maps 上的 review 里的照片一大半都是这里。可能老外看了半天别的都不认识只能看出这是个教堂?又或者他们没想到这里会有个教堂?


张记果品😂

远处应该是东塔,更远处应该是福陵
东西南塔都来了,为没有存在感的北塔默哀一分钟😂



路上还有轿车!

中间偏左的大概是张氏帅府?


马半仙😂😂😂
一圈绕完了。还行,大部分东西都能认出来。
看完之后有怀念故乡吗?
难说。可能与其说是怀念,不如说是好奇吧。
有的时候我会觉得自己是个没有故乡的人。
我并不会讲沈阳话。我父母都来自辽宁最西部的农村,属于北京官话区。而且他们都是硕士,起码是受过标准用语训练的。所以可以说我的母语就是普通话。如果说要模仿沈阳话,大概还是讲得出来的。但日常生活中肯定是不会用。
我们家在沈阳也很不典型。我认识的亲戚里一个国企工人也没有,以至于在纪录片《铁西区》里,除了能认出白底绿条纹涂装的公交车之外,我看到的完全是一个陌生的世界。
我的个性也很不符合东北人的刻板印象。一点也没有豪放的劲。
至于沈阳的风土人情我也一概不知道。从小长这么大大概吃过两回鸡架。
甚至城里的很多地方我都没去过。多少年来就是从城北的家到城中的初中到城南的高中这一趟线,去东边和西边的次数都数得出来。
所以说,我对我的故乡,基本上还是挺冷漠的。有的时候我也为此感到悲哀。活了这么多年,成了无本之木。
而另一方面呢,离开故乡这么多年,我又开始对它充满好奇。我很想了解一下这一座我据说生活了很多年但又知之甚少的城市。尤其是近代史——我的母校最早是满铁附属地日本人的学校,于是这座城市的近代史似乎与我发生了某种联系。而满洲国在我们的历史课里基本上是个避而不谈的话题。这种神秘感又导致了特别的 appeal。
而今天我在大洋彼岸看到了故乡的近代史。也挺巧的吧。
嘛……确实该回去看看了。去数数城里还有几个印着满铁路徽的井盖也好啊。