此篇给出 Oh 的所有子群,并讨论具有特定对称性的状态数的计算方法。如前所述,魔方的任何状态的空间对称群是 Oh 的子群。因此,魔方状态的对称性可以按 Oh 的子群分类。
先考虑一下分类的粒度。不同的点群当然表示不同的对称性,但相同的点群也可能有所区别。对等价对称性的一个很自然的要求是,如果两个状态可经全等变换后在换色意义下等价,那么它们的对称性等价。换色不影响对称性;全等变换不改变一个状态的对称性的点群,但可以改变旋转轴和反射平面的位置。但是,Oh 中的全等变换不改变转轴和反射平面的位置分类,即,面心旋转轴仍为面心旋转轴,边心旋转轴仍为边心旋转轴,等等。因此,点群相同但旋转轴和反射平面的位置分类不同的对称性不等价。
以群论的语言表述,即魔方状态的对称性类别对应于 Oh 的子群的共轭类。以下列举 Oh 的所有子群共轭类。当表示两个点群结构相同的子群时,视情况括注其旋转轴或反射平面以示区分:中括号内的 x、y 和 z 的线性组合,表示其系数向量为一个最高重数的旋转轴。例如,C3[x+y–z] 表示以 (1, 1, -1) 为旋转轴的 3 重旋转对称。大括号内的 x、y 和 z 的线性组合,表示其零空间为一个反射平面。例如,Cs{x-y} 表示沿平面 x–y=0 的反射对称。有多个旋转轴或反射平面时,以逗号分隔,不必全部注明,只需注明为消除歧义所必要的部分。表示共轭类时,括注其对称轴和反射平面的位置分类,f 为面心旋转轴或面反射平面,e 为边心旋转轴或边反射平面。
- 有多个多重旋转轴。7 种有多个多重旋转轴的点群中,以下 5 种是 Oh 的子群:Oh,O,Td,Th,T,分别只有一个子群。
- 只有一个多重旋转轴,即 n≥3 的棱柱点群。
- 有面心 4 重旋转轴。在此基础上可以增加与 4 重旋转轴垂直的二重旋转轴、过 4 重旋转轴的反射平面、与 4 重旋转轴垂直的反射平面,但不能增加 45° 旋转反射,可得以下点群:D4h,D4,C4v,C4h,C4。面心旋转轴有 3 个,因此以上每种子群有 3 个。
- 有对角 3 重旋转轴。在此基础上可以增加与 3 重旋转轴垂直的二重旋转轴、过 3 重旋转轴的反射平面、60° 旋转反射,但不能增加与 3 重旋转轴垂直的反射平面,可得以下点群:D3d,D3,C3v,S6,C3。对角旋转轴有 4 个,因此以上每种子群有 4 个。
- 无多重旋转轴,即 n≤2 的棱柱点群。这样的群共有 10 种,都是 Oh 的子群,但其中有一些有不同的共轭类。
- n=2
- D2h:有 3 个两两垂直的二重旋转轴及点反演。
- 全部为面心旋转轴,记为 D2h[ff]。由于使用了所有面心旋转轴,只有一个子群。
- 有一个面心旋转轴和两个边心旋转轴,记为 D2h[e]。面心旋转轴有 3 个,选定面心旋转轴后两个边心旋转轴也唯一确定,因此有 3 个子群。
- D2d:有 3 个两两垂直的二重旋转轴及过其中一个旋转轴、平分另外两个旋转轴的反射平面。
- 全部为面心旋转轴。反射平面过 3 个面心旋转轴中的一个,为边反射平面,记为 D2d{e}。有 3 个子群。
- 有一个面心旋转轴和两个边心旋转轴。面心旋转轴有 3 个,选定面心旋转轴后两个边心旋转轴也唯一确定,且反射平面只能过面心旋转轴,为面反射平面,记为 D2d{ff}。有 3 个子群。
- D2:有 3 个两两垂直的二重旋转轴。
- 全部为面心旋转轴,记为 D2[ff]。由于使用了所有面心旋转轴,只有一个子群。
- 有一个面心旋转轴和两个边心旋转轴,记为 D2[e]。面心旋转轴有 3 个,选定面心旋转轴后两个边心旋转轴也唯一确定,因此有 3 个子群。
- C2h:有一个二重旋转轴和与其垂直的反射平面。
- 面心旋转轴,记为 C2h[f]。有 3 个子群。
- 边心旋转轴,记为 C2h[e]。有 6 个子群。
- C2v:有两个互相垂直的反射平面。
- 两个面反射平面,记为 C2v{ff}。面反射平面有 3 个,两两垂直,因此可任取两个,有 3 个子群。
- 一个面反射平面和一个边反射平面,记为 C2v{fe}。面反射平面有 3 个,选定一个后有两个边反射平面与之垂直,因此有 6 个子群。
- 两个边反射平面,记为 C2v{ee}。若两个边反射平面互相垂直,则他们相交的直线必为面心旋转轴,因此有 3 个子群。
- S4:有一个 4 重旋转反射轴。只能是面心旋转轴。有 3 个子群。
- C2:有一个二重旋转轴。
- 面心旋转轴,记为 C2[f]。有 3 个子群。
- 边心旋转轴,记为 C2[e]。有 6 个子群。
- D2h:有 3 个两两垂直的二重旋转轴及点反演。
- n=1
- Cs:有一个反射平面。
- 面反射平面,记为 Cs{f}。有 3 个子群。
- 边反射平面,记为 Cs{e}。有 6 个子群。
- Ci:点反演,一个子群。
- C1:无对称,一个子群。
- Cs:有一个反射平面。
- n=2
共计 25 种不同点群,33 个共轭类,98 个子群。图 1 对每个共轭类以一个子群为例给出其所有元素。下方数字为其所包含的上一篇给出的 Oh 的每类元素数量
| 旋转 | 恒等变换 | 对角 120° | 面心 90° | 面心 180° | 边心 180° |
| (旋转)反射 | 点反演 | 对角 60° | 面心 90° | 面反射 | 边反射 |
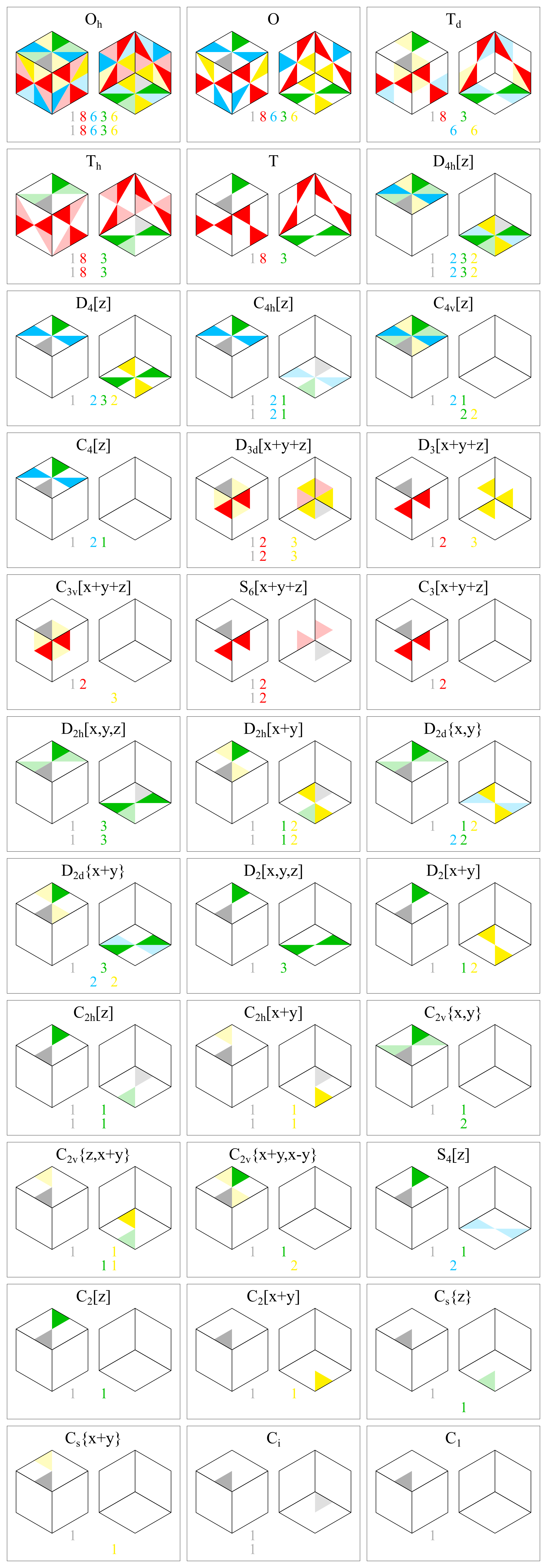
图 2 为 Oh 的子群格。共轭的子群已合并,框中红色数字为同一共轭类的子群数量。图两侧数字为阶,黑色、绿色、蓝色、红色连线分别表示每个上方的群包含 1个、2 个、3 个、4 个下方的群为其子群。

接下来讨论给定 Oh 的子群 G,如何计算空间对称群包含 G 的状态总数。为简便,按以下方式表示 Oh 的元素:旋转为 r[轴,角],反射为 m{平面},旋转反射为 s[轴,角],旋转轴和反射平面的表示与前述子群记号相同,角度为沿轴向量的反方向所见的逆时针旋转角。另外,对任一变换 f,用 f*表示 f 加上换色,使得标准状态下的所有中心块在 f* 下不变。例如,r[z,90°]* 意为绕 z 轴逆时针旋转 90° 后再进行换色 (R B O G)。
考虑 G 的作用下组块位置集合中的轨道。若指定某个组块的状态,则为使得魔方整体状态具有 G 对称,与其所在位置在同一轨道的其他位置的组块及其状态也唯一确定。因此我们可以以轨道为单位进行分析。首先暂不考虑状态的合法性,仅考虑对称性。
某个组块可以处于的状态不是任意的。如,希望构造一个有 Cs{x–y} 对称的状态。若有 WBR @ FLU,则经 m{x–y}* 之后状态应不变,可得 WBR @ RUB(图 3),而 WBR 组块只有一个,不能同时处于两个位置,故此状态不可能。
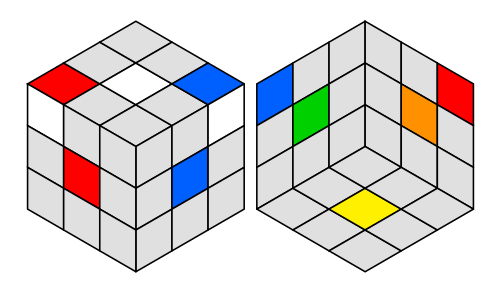
一般地,如果某组块的标准位置在 G 中的某个镜面反射 m 的反射平面上,那么经 m* 换色后此组块仍为其本身。而若某状态下此组块不在此反射平面上,则根据对称性条件,此组块须同时位于两个不同位置,这不可能。因此,如果某组块的标准位置在 G 的某个反射平面上,则在具有 G 对称性的状态中它仍在同一反射平面上。进一步可以证明标准位置在反射平面上的面片必须仍在此反射平面上,这意味着反射平面上的棱块不能旋转。
类似地,如果某组块的标准位置在 G 中的某个旋转轴上,则它必须仍在此旋转轴(含其反向延长线)上。进一步可以证明,在三重旋转轴上的棱块不能移至其反向延长线上,只能保持原位置。
以群论的语言表述,在任一具有 G 对称性的状态下,任意组块的标准状态到其当前状态的变换必属于 G 对其标准位置的稳定化子的在 Oh 中的中心化子。
角块的稳定化子只有 4 种可能 ,棱块的稳定化子只有 5 种可能,因此事实上不必做理论分析,直接枚举所有情况也并不难。在状态存在性条件下,每个组块按其标准位置的稳定化子分类,可能状态的限制如下:
- 角块
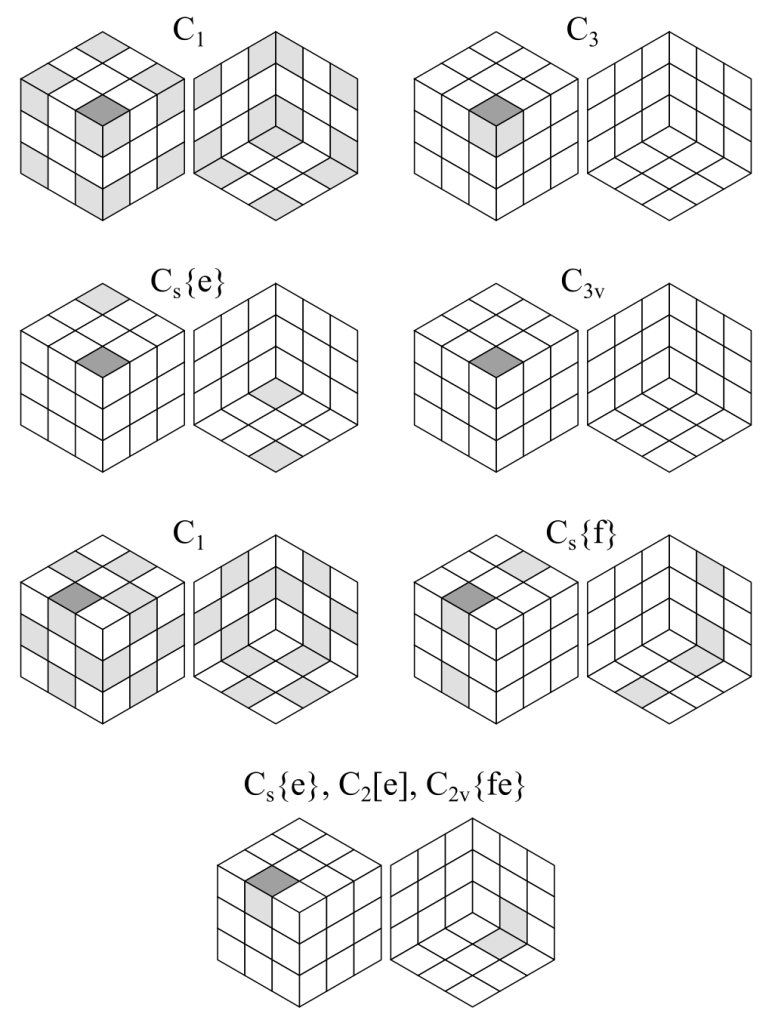
- C1 → O:标准位置不在任何旋转轴和反射平面上,状态无限制,共 24 种状态。
- C3 → C3:标准位置只在对角旋转轴上。可以原地旋转,共 3 种状态。
- Cs{e} → D2:标准位置只在边反射平面上。可以绕在此反射平面上的两个旋转轴或垂直于此平面的旋转轴旋转 180°,共 4 种状态。
- C3v → C1:标准位置同时在反射平面和对角旋转轴上。只能保持原位。
- 棱块
- C1 → O:标准位置不在任何旋转轴和反射平面上,状态无限制,共 24 种状态。
- Cs{e} → D2,C2[e] → D2,C2v{fe} → D2:标准位置在边反射平面和/或边心旋转轴上,可以翻转和移动到对边上,共 4 种状态。
- Cs{f} → D4:标准位置只在面心反射平面上,可以在此平面内任意换位及翻转,共 8 种状态。
图 4 给出了角块和棱块的每种稳定化子对应的可能状态。当深灰色面片所在位置具有如上所示的稳定化子时,其在状态可能性限制下的其他可能位置标记为浅灰色。
原则上应注意不同组块的位置限制的相互作用,如,若某组块 A 占据了另一组块 B 的标准位置,则 B 必须有其他可能位置,但实际上只需满足另一个更简单的条件:由于同一轨道中一个组块的状态决定整个轨道的状态,两个轨道只能整体互换位置,因此若组块 A 占据了不属于同一轨道的组块 B 的标准位置,则 A 和 B 所在的轨道包含的组块数必须相等。这一条件排除了组块位置限制不对等的情况,因此若某组块 A 占据了不同轨道的组块 B 的标准位置,则 B 总可以占据 A 的位置。
由此限制条件后,可以计算具有对称性 G 的全部状态如下:首先将组块位置在 G 的作用下划分轨道。将轨道按其所包含的位置的稳定化子的共轭类分类。一般来说,组块可能状态的限制会使得同类的轨道间或者可以任意整体互换位置,或者完全不能互换位置,但在极少数情况下只有部分轨道可以互换。此时将轨道类进一步细分以保证同类的轨道可以任意互换或完全无法互换。
对每个轨道类,其通过轨道内组块互换位置可以获得的状态数等于其中任一个组块的可能状态中位于此轨道内的状态数。若此轨道类有 m 个轨道,每个轨道内有 n 种状态,则轨道间可以互换位置时总状态数为 nm×m!,否则为 nm。所有轨道类的可能状态数相乘,即得可能状态总数。
最后考虑状态合法性。对于每个轨道类,检查其轨道内的状态是否可能产生非零的旋转数或翻转数或组块的奇置换;对于可互换位置的轨道类,检查轨道间互换是否会产生奇置换(即每个轨道中的位置数是否为奇数)。如有任何一个轨道类产生非零旋转数、非零翻转数或奇置换,总状态数相应除以 3、2、2,即得合法状态数。
